Çeşitli kaynaklardan çevirerek derlediğim ve Nikon firmasının 2003 yılında D2H kamerasında kullandığı ve adına LBCAST denen sensör hakkında bilgi
Nikon firması Temmuz 2003’de Nikon’un amiral gemisi konumundaki
D2H kamerasını LBCAST isminde CCD ve CMOS dan farklı yeni bir sensör kullanarak
pazara sunduğunu açıkladı. Bu sensör hızlı, düşük noise ve enerjiyi verimli kullanıyordu. Nikonun LBCAST
sensörü ne CMOS nede CCD idi. Bu sensör, Nikon’ un CCD ve CMOS teknolojilerinin
avantajlarının birleştirilmesiyle geliştirilmiş yepyeni bir kavramdır.
Geleneksel sensörlerden farklı olarak enerjiyi az kullanır. Daha az karanlık
parazit üretirler. Görüntü işleme, renk, kontrast ve hassasiyette daha iyidirler.
Nikon 1980 yılından bu yana CCD’den farklı bir sensör geliştirmeye çalışıyordu
ve sonunda başarmıştı.
LBCAST sensörü CCD ve CMOS ile kıyasladığımızda;
CMOS’un enerji verimi ve makinenin çekime hazır hale gelme hızına karşı CCD
genellikle daha az parazit (noise) üretir. Bu anlamda LBCAST sensörün her iki
teknolojiyi de birleştiren bir kavramdır.
Akla hemen LBCAST sensörü CMOS tabanlı mıdır sorusu
gelmektedir?. Nikon çalışmaya başladığı 1980’li
yıllarda düşük sinyalleri yüksekten sensörler zaten mevcuttu ve CMOS diye bir
isim de yoktu. CMOS, LBCAST için çevresel devre olarak kullanılabilir.
AYDINLANMA ÖNCELİKLİ NE DEMEK?
Eğer bir filmin katmanlarına bakıyor olsaydık, hangi
katmanda hangi rengin oluştuğunu söylememiz zor olacaktı. Çünkü ışık filme
çarparak görüntüyü oluşturur. Bu çarpma anında yüzlerce polimerden oluşan
şeffaf katmanlar bu ilginç dizaynı oluşturmaktadır. Değişik açılardan yansıyan
ışıklar, değişik uzunluklardadır, çünkü değişik açılardan gelmektedirler. Bu
ışık teorisinin bir parçasıdır. Şimdi sormamız gereken soru; Işığın, fotoğrafla arasındaki bağlantısı nedir ve film
renkleri nasıl kaydeder. Değişik dalga boyundaki ışıklar, farklı açılarla filmin
üzerinde bulunan birbirinden farklı katmanlara çarparak onunla etkileşime
girer ve fotoğrafı oluştururlar. Filmde her 3 ana rengin tespit edildiği katmanlar
bulunmaktadır. Diğer renkler ise bu katmanların çeşitli etkileşimleriyle
oluşmaktadır.
Diğer taraftan; dünyayı nasıl gördüğümüze bir bakalım.
Gözlerimiz, detayları ışık içinde görür. Nesneleri kameranın gördüğü şekilde yani
kırmızı, yeşil ve mavi katmanları olarak görmeyiz. Film katmanları arasına
değişik dalga boyunda ışık geldiğinde uygun katmanda görüntüyü tespit etmek
üzere, görüntüyü oluşturan mekanizmayı tetikler. Gözlerimiz
nesneleri filmden farklı görürler. Detaylar en üstte yer alan aydınlanma
katmanında yakalanırlar. Bu aydınlanma katmanı LB-CAST sensörünün netliği ve detayı en çok yakaladığı yerdedir.
Aydınlanma öncelikli renkli
algılayıcının (LPCS) yapısı
Bir LPCS algılayıcı bir sürü algılayıcı elementin
yerleştirildiği yarı iletken tabanlı bir teknolojidir. Bu algılayıcı
elementlerin 2 tane görevi vardır.
1-) Yarı iletken alt tabakasının dışında yer alan
renkleri algılayan katman; Frekans bandındaki ışığın yoğunluğunu ölçerek, en az
bir tane renge karşılık gelen değeri algılar.
2-) En az bir rengin algılandığı katmanın dışındaki katmanda
aydınlanmayı ölçer.
Bu icadın yapılmasındaki ana
amaç elektronik bir algılayıcının üzerindeki bir katmanda oluşan aydınlanmanın
insan gözüyle çok benzer tepkiler vermesidir. Bu nokta normal CCD ve CMOS’ ta
farklılık göstermektedir.
Bu anlamda LPCS algılayıcı insan gözüne en yakın
sistem olarak düşünülebilir.
Hatırlayın aydınlanma=detay’dır. Çok aydınlanma
sağlarsanız çok detay elde edersiniz.
Bu Photoshop’taki netleştirme özelliği gibidir. PS’ nin
sırrı netleştirilen bir fotoğraftadır. PS’da fotoğrafın uç noktaları etrafındaki özel
yerlerden gelen renklerden çoğu zaman yalnızca BEYAZ rengin aydınlığını
kullanarak netlik yapmaktadır. PS’nin algoritması konunun uç noktalarındaki
temel renklerin aydınlığından yararlanma eğiliminde olup, netleştirmeyi bu sayede yapmaktadır.
Aydınlanma öncelikli renkli
algılayıcı ne demek?
Renk algılama sönsörünün ilk algılama tabakası; Işık
kaynağından gelen ışığın ilk spektrumuna tepki verecek şekilde dizayn
edilmiştir. Ayrıca en az bir tane ikincil spektruma tepki verecek ve ilk spektruma
tepki veren katmandan farklı bir ikinci katman
daha bulunur. İkincil spektruma tepki verecek katman, ilk spektruma tepki
verecek katmanı dengelemek için dikey düzlemde yerleştirilmiştir.
Geleneksel CCD ve Aydınlanma öncelikli
renkli algılayıcı
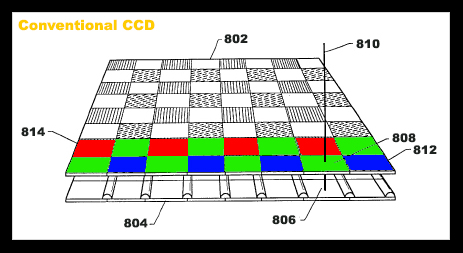 | ||||||||
| Geleneksel CCD sensör yapısı |
802:
Renkleri algılayan tabaka
804:
CCD algılaycı
806:
Diod
808:
Yeşil renk filtresi
810:
Işık demeti
812:
Mavi filtre
814:
Kırmızı filtre
(802) Renkli matriks tabaka CCD algılayıcısının (804)
üstüne ince bir tabaka halinde yerleştirilmiştir. Her bir diodun (806) üstünde renkleri
yakalayan bir filtre vardır (808). Bu filtre ışık demetini (810) filtre eder. Bu
tipik Bayer dizilimi, birçok dijital makine ve aygıt için kullanılmaktadır.
 | |
| LBCAST Sensörün yapısı |
1002:
Basit CCD katmanı; Görünüşe göre CCD’de değişemeyecek bir katman.
1004:
Bilinen CCD algılayıcı dizilimi. Bu da yeni değil
1006:
Kırmızı renk yutuluyor. Yeşil renk 1004 nolu katmanın üstünden geçiyor. Bu
filtre SARI filtrenin altınadır.
1008:
Diğer bir CCD algılayıcı dizisi katmanı.
1010:
1008 katmanı üzerine yerleştirilmiş diğer bir sarı filtre
1012:
En üste bir dizi algılayıcı yerleştirilmiştir.
1014:
Bir kırmızı ışık demeti 1006 nolu CYAN filtre onu yutmadan önce 1008 ve 1012
katmanları tarafından teşvik edilerek geçişi..
1016:
Bir yeşil ışık demetinin algılayıcıya girişi 1004, 1008 ve 1012 katmanları
tarafından teşvik ediliyor. Yeşilin yakalanma seviyesi maksimumda.
1018:
Bir mavi ışık demetinin algılayıcıya girişi sadece en üstteki katman 1012
tarafından teşvik ediliyor.
ÖZET
Görüntüyü oluşturan her noktaya olan erişim eşit
miktarda ve 3 renginde bulunduğu düzlemde gerçekleşmekte ve bu sayede parlak
bir nokta veya dar beyaz bir çizgi bile aynı renk üzerinde diğerlerinden
bağımsız olarak algılanarak matriks ile hizalanmaktadır. Bu buluş ile; Mevcut
teknolojide renkte insan eliyle yapılmış izlenimini uyandıran harelenmeler
ortadan kaldırılmıştır.
Burada CCD ve JEFT LBCAST algılayıcı arasındaki fark
anlatılmaktadır. Dijital kameralara algılayıcılar yerleştirilmeye
başlandığından bu yana KIRMIZI, YEŞİL ve MAVİ renge aynı anda ve eşit miktarda
erişim CCD’de maalesef mümkün değildir. Çünkü
renkleri yakalayan hücrelerin yerleşim mimarisi gereği bu imkansızdır. Aşağıdaki şekilde bir CCD algılayıcıdaki renk yakalama hücrelerinin dizilimi görülmektedir. Buraya dikkat; KIRMIZI rengi tespit eden hücrenin etrafında 4 YEŞİL ve 4 MAVİ renk tespit hücresi, MAVİ rengi tespit eden hücrenin etrafında 4 KIRMIZI ve 4 YEŞİL renk tespit hücresi ama YEŞİL renk tespit eden hücrenin etrafında sadece 2 KIRMIZI ve 2 MAVİ renk tespit hücresi bulunmaktadır. Bu durumda kameranın mikro bilgisayarı YEŞİL renk tespit hücresinin etrafındaki 2 KIRMIZI ve 2 MAVİ rengi tespit eden hücrelerin yokluğu nedeniyle YEŞİL rengi direkt olarak görememekte ve bunu interpolasyon denilen hesaplama tekniğine göre hesaplamaktadır.
LB-CAST sensörde ise renk yakalama birden çok filtre kullanarak yapılabilmektedir. Bu filtreler yansıma yaparak tüm renklere erişimi sağlamaktadır. Bu yöntem ise harelenme etkisini azaltmaktadır, çünkü renk yakalama olayı katmanlarda gerçekleşmektedir ve renk yakalama hücrelerin sıralamasına bağlı değildir. Algılayıcının dizaynından dolayı mavi renk 2 defa yansıdığı ve kırmızı rengin ise yine dizayn nedeniyle doğal olarak algılayıcıyı daha fazla etkilediğinden, algılayıcıda elde edile IŞIK/AYDINLANMA oranı birbirine eşit olmaktadır.
 |
| CCD Sensörde renk filtrelerinin dizilimi |
LB-CAST sensörde ise renk yakalama birden çok filtre kullanarak yapılabilmektedir. Bu filtreler yansıma yaparak tüm renklere erişimi sağlamaktadır. Bu yöntem ise harelenme etkisini azaltmaktadır, çünkü renk yakalama olayı katmanlarda gerçekleşmektedir ve renk yakalama hücrelerin sıralamasına bağlı değildir. Algılayıcının dizaynından dolayı mavi renk 2 defa yansıdığı ve kırmızı rengin ise yine dizayn nedeniyle doğal olarak algılayıcıyı daha fazla etkilediğinden, algılayıcıda elde edile IŞIK/AYDINLANMA oranı birbirine eşit olmaktadır.
Bu algılayıcı ile ilgili
patent kurulunun görüşü; Dijital fotoğrafçılık için dramatik bir iyileşmeyi
temsil eden, pazarda tüm elektronik cihazlarda kullanılabilecek yeni bir
dünyanın kapılarını açacak pratik bir algılayıcı olduğu yönündedir. Aydınlanma öncelikli bu
sensör görüntü netliği ve renklerde oluşan harelenme etkisini minimize ettiği ve
yarattığı yenilikler nedeniyle kendisinden önce gelen tüm teknolojileri
geride bırakmıştır.
Çok ilginç bir açıklama değil mi? tek katmanlı bir
algılayıcı da en az 3 farklı katmandan oluşan bir algılayıcı kadar renk
algılama gibi benzer bir fonksiyonu yerine getirebilmektedir. Bu olay sadece
dijital fotoğraf makinelerinde değil, diğer video kameralarda da
kullanılabilecektir. Bir çoğumuz 3 CCD' li yüksek teknoloji ürünü kameralar
alırken, bu algılayıcı sayesinde bu güne kadar görüntü algılayıcıları hakkında
öğrendiklerimiz değişeceğe benziyor.
Peki Nikon neden bu algılayıcıyı
sadece D2H modelinde kullandı ve sonra kullanıma devam etmedi. Bunun kesin
cevabını Nikon yetkilileri verebilir ama izin verirseniz bende bir tahminde
bulunmak istiyorum. LBCAST algılayıcının geliştirme maliyetinin çok yüksek olduğunu
Nikon yetkilileri açıklamıştı. Hatta açıklamada; 1 algılayıcının üretim maliyetinin 1 kameranın maliyetinden daha
fazla olduğu da belirtilmişti. Bu algılayıcının sadece Nikon marka kameralarda kullanılması durumunda üretim
maliyeti yüksekte kalacağı için, araştırmaya daha fazla para ayırmak
istemeyerek bence en ölümcül hatayı yaptılar. DSLR
kameraları için teorik olarak CMOS algılayıcıdan daha avantajlı olan CCD algılayıcı kullanmaya karar verdiler. Bu karar, Nikon için çok kötü bir karardı. Çünkü düşük ışık koşullarında 400 ISO’ da bile inanılmaz GREN
(noise, kumlama, parazit, gürültü..) oluşuyordu. O dönemde birçok profesyonel Nikon
kullanıcısı; Hem CCD sensör kullanımı sonucu oluşan GREN nedeniyle hemde
Nikon’un piyasada tam kare algılayıcılı kamerası olmaması nedeniyle Canon 5D’ ye
geçtiler.







